

FAULT_CODE_OVER_VOLTAGE / Перенапряжение ⚓
Описание: Входное напряжение превысило максимально допустимый предел, установленный в настройках (Maximum Input Voltage).
Возможные причины:
- Рекуперативное торможение при полностью заряженной батарее (напряжению некуда уходить).
- Лимит напряжения настроен слишком близко к номинальному напряжению батареи.
- Вращение мотора внешним воздействием (спуск с горы) на скорости, превышающей KV мотора.
Решение: Увеличьте лимит Max Input Voltage (обычно 57В для 12S). Не заряжайте батарею на 100% перед спуском. Настройте ограничение тока рекуперации (Batt Min Current).
FAULT_CODE_UNDER_VOLTAGE / Низкое напряжение ⚓
Описание: Входное напряжение упало ниже минимального порога (Minimum Input Voltage).
Возможные причины:
- Батарея разряжена.
- Слабый источник питания (просадка под нагрузкой).
- Плохой контакт в силовых разъемах или длинные тонкие провода питания.
- Отключение BMS батареи.
Решение: Зарядите батарею. Проверьте надежность пайки и разъемов XT60/XT90. Убедитесь, что настройки отсечки (Cutoff Start/End) верны.
FAULT_CODE_DRV / Ошибка драйвера DRV ⚓
Описание: Контроллер не может связаться с чипом драйвера затворов (DRV83xx) или драйвер сообщает о внутренней ошибке. Это часто указывает на физическую неисправность.
Возможные причины:
- Замыкание фазных проводов мотора.
- Сгорание чипа DRV из-за скачков напряжения или перегрева.
- Плохая пайка чипа или металлический мусор на плате.
Решение: Проверьте провода и мотор на КЗ. Если проводка цела — требуется ремонт контроллера (замена DRV).
FAULT_CODE_ABS_OVER_CURRENT / Абсолютное превышение тока ⚓
Описание: Мгновенный скачок тока превысил аппаратный предел измерения усилителя (обычно 130А+). Экстренная защита.
Возможные причины:
- Короткое замыкание в обмотках.
- Чрезмерно агрессивные настройки PID.
- Механическая блокировка мотора на полном газу.
- Неверные параметры L/R при детекции.
Решение: Проверка изоляции мотора. Повторная детекция (FOC Wizard). Снижение агрессивности разгона.
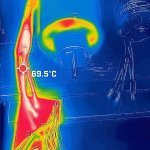
FAULT_CODE_OVER_TEMP_FET / Перегрев MOSFET ⚓
Описание: Температура силовых транзисторов превысила критический порог (обычно 85°C - 100°C).
Решение: Обеспечьте лучшее охлаждение (радиатор, обдув) или снизьте фазные токи (Motor Current Max) и длительность нагрузки.
FAULT_CODE_OVER_TEMP_MOTOR / Перегрев мотора ⚓
Описание: Температура мотора превысила допустимый предел по показаниям датчика.
Возможные причины: Реальный перегрев или неверно выбранный тип термодатчика (NTC/PTC/KTY) в настройках.
Решение: Проверьте температуру рукой. Если холодно — проверьте настройки типа сенсора и целостность проводов.
FAULT_CODE_GATE_DRIVER_OVER/UNDER_VOLTAGE / Питание драйвера затворов ⚓
Описание: Напряжение внутреннего питания драйвера затворов вышло за допустимые рамки.
Решение: Это аппаратная неисправность цепей питания на плате контроллера. Требуется диагностика компонентов.
FAULT_CODE_MCU_UNDER_VOLTAGE / Низкое питание MCU ⚓
Описание: Напряжение питания микроконтроллера (STM32) упало ниже 3.3В.
Возможные причины: Неисправность стабилизатора 3.3В или короткое замыкание во внешней периферии (приемник, ручка газа, Bluetooth).
Решение: Отключите все внешние модули от разъемов ADC/UART/PPM. Если ошибка исчезла — проблема в периферии.
FAULT_CODE_BOOTING_FROM_WATCHDOG_RESET / Сброс по сторожевому таймеру ⚓
Описание: Микроконтроллер "завис" и был принудительно перезагружен системой защиты.
Причины и Решение: Сильные электромагнитные помехи (используйте ферриты), ошибки в прошивке (обновите FW) или неисправность памяти.
FAULT_CODE_ENCODER_SPI / Ошибка SPI энкодера ⚓
Описание: Отсутствует связь с цифровым энкодером (например, AS5047).
Решение: Проверьте провода, распиновку разъема датчик, наличие помех.
FAULT_CODE_ENCODER_SINCOS_AMPLITUDE / Амплитуда SinCos энкодера ⚓
Описание: Сигнал аналогового энкодера слишком слабый (Below Min) или слишком сильный (Above Max).
Решение: Отрегулируйте расстояние от магнита до датчика, проверьте центровку магнита и контакты.
FAULT_CODE_FLASH_CORRUPTION / Повреждение памяти ⚓
Описание: Данные прошивки или конфигурации повреждены.
Решение: Немедленно перепрошейте контроллер (Re-flash firmware). Если ошибка возникает снова — возможен дефект чипа STM32.
FAULT_CODE_HIGH_OFFSET_CURRENT_SENSOR / Смещение датчиков тока ⚓
Описание: При включении контроллер обнаружил паразитное напряжение на датчиках тока (они показывают ток, когда мотора стоит). Относится к датчикам 1, 2 и 3.
Решение: Аппаратная проблема. Попробуйте выполнить калибровку, очистить плату. Часто требует ремонта схемотехники.
FAULT_CODE_UNBALANCED_CURRENTS / Дисбаланс токов ⚓
Описание: Сумма токов фаз не равна нулю, что физически невозможно в замкнутой системе.
Причины: Неисправность операционных усилителей тока или утечка тока на корпус.
FAULT_CODE_BRK / Аппаратная защита ⚓
Описание: Сработал аппаратный триггер защиты (актуально для старых версий VESC). Обычно означает короткое замыкание.
FAULT_CODE_RESOLVER_LOT/DOS/LOS / Ошибки резольвера ⚓
Описание: Ошибки отслеживания (LOT), деградация сигнала (DOS) или потеря сигнала (LOS) резольвера.
Решение: Проверка проводки, экранирования кабелей резольвера и настроек возбуждения.
FAULT_CODE_ENCODER_MAGNET / Ошибка магнита ⚓
Описание: Проблема с индукцией магнита для энкодера. "No magnet" — магнит слишком далеко/слабый. "Magnet too strong" — магнит слишком близко.
Решение: Механическая регулировка зазора между магнитом и чипом (обычно 1-3 мм).
FAULT_CODE_PHASE_FILTER / Ошибка фазного фильтра ⚓
Описание: Некорректные показания с фазных фильтров.
Решение: Если ваша плата не имеет аппаратных фазных фильтров (большинство старых 4.12 и мини-версий), убедитесь, что опция Phase Filter выключена в настройках VESC Tool.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}