

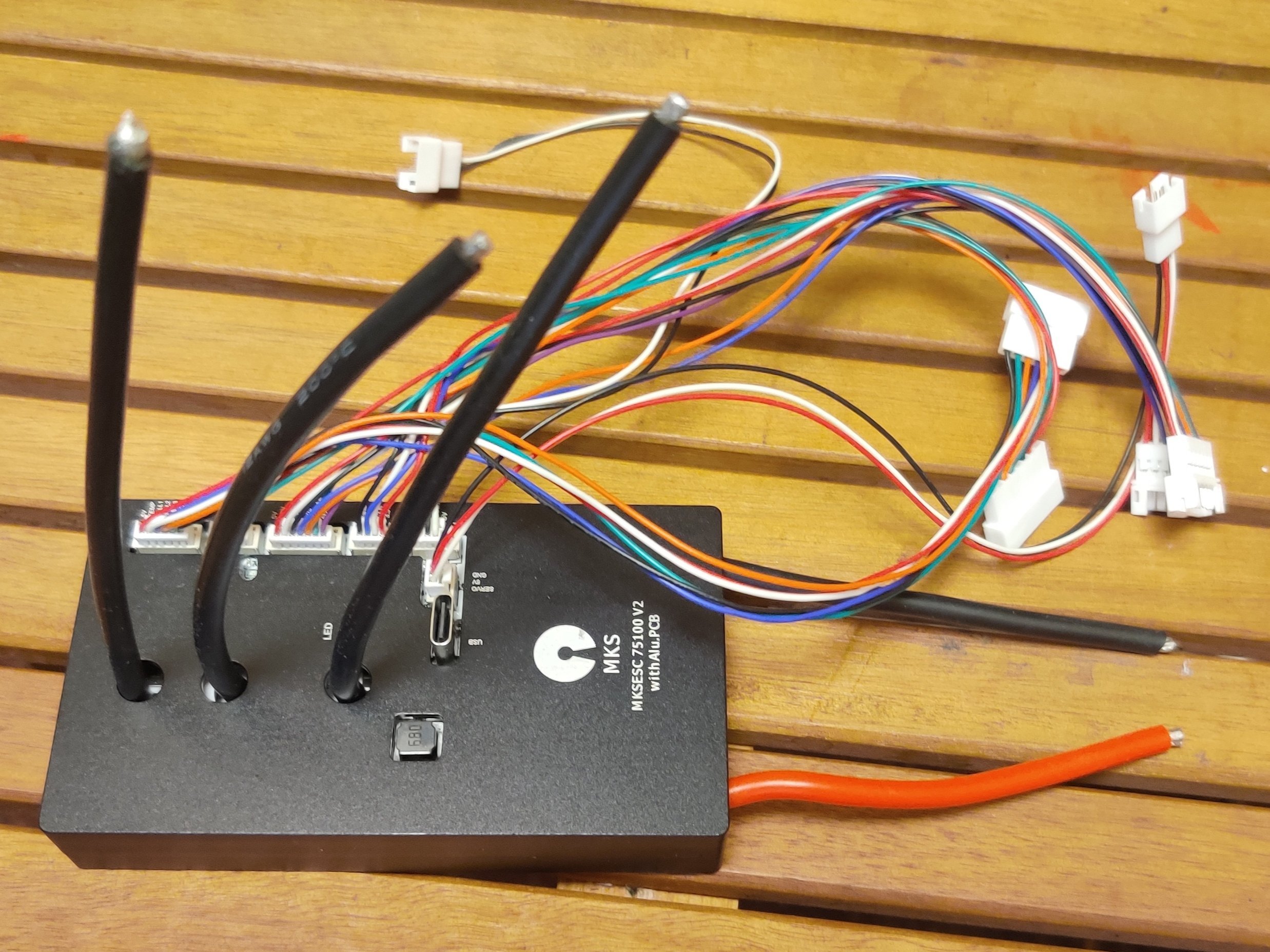
Контроллер VESC (Vedder Electronic Speed Controller) — это продвинутый, программируемый контроллер скорости с открытым исходным кодом, предназначенный для управления бесколлекторными двигателями (BLDC). Его основная задача — точно регулировать скорость, направление и мощность двигателя, получая питание от аккумулятора и команды от устройства управления.
Основной принцип работы:
- Входной сигнал: Контроллер получает команду от пользователя через пульт, джойстик или другой микроконтроллер. Этот сигнал указывает желаемую скорость и направление вращения двигателя.
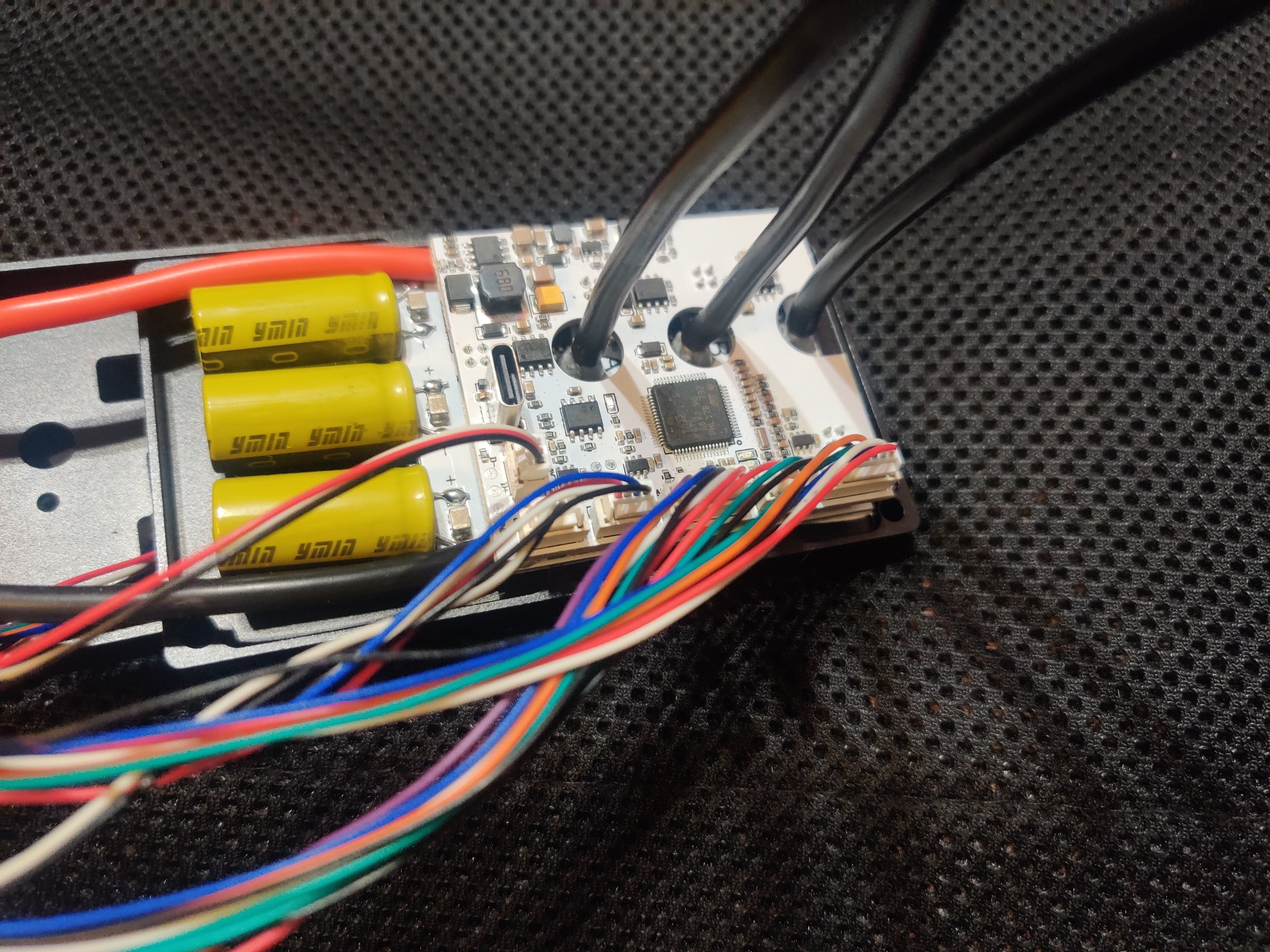
- Обработка данных: Встроенный микроконтроллер обрабатывает этот сигнал, используя сложные алгоритмы для расчета оптимальной стратегии управления двигателем.
- Управление питанием: VESC берет постоянный ток от аккумулятора и преобразует его в трехфазный переменный ток для питания обмоток бесколлекторного двигателя. Это достигается с помощью широтно-импульсной модуляции (ШИМ), которая позволяет точно дозировать мощность, подаваемую на двигатель.
Ключевые особенности:
- Векторное управление (FOC): В отличие от простых ESC, многие VESC используют метод векторного управления. Эта технология позволяет контролировать не только скорость, но и точное положение ротора двигателя. Результатом является более плавная и тихая работа, высокий крутящий момент на низких оборотах и повышенная эффективность.
- Высокая степень настройки: С помощью специального программного обеспечения (VESC Tool) пользователь может настроить множество параметров:
- Ограничения по току: Установка максимального тока для двигателя и аккумулятора, чтобы предотвратить их повреждение от перегрузки.
- Ограничения по напряжению: Защита аккумулятора от чрезмерной разрядки.
- Температурный контроль: Защита контроллера и двигателя от перегрева.
- Кривые ускорения и торможения: Настройка плавности разгона и торможения.
- Открытый исходный код: Программное и аппаратное обеспечение VESC является открытым, что привлекает множество энтузиастов и разработчиков, которые могут модифицировать и улучшать его.
- Рекуперативное торможение: VESC поддерживает функцию рекуперации, которая позволяет заряжать аккумулятор во время торможения или движения накатом.
Благодаря своей гибкости, эффективности и широким возможностям настройки, контроллеры VESC стали популярным выбором для энтузиастов в сфере электротранспорта, такого как электроскейтборды, электровелосипеды, скутеры и электосамокаты.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}