

Duty cycle в контексте электронного скоростного контроллера (ESC), такого как VESC (Vedder Electronic Speed Controller), относится к широтно-импульсной модуляции (ШИМ или PWM — Pulse Width Modulation), которая используется для управления мощностью, подаваемой на электродвигатель.
Проще говоря, duty cycle — это процент времени, в течение которого сигнал включен (или "активен") по отношению к общему периоду сигнала. Если представить себе сигнал в виде прямоугольных волн, то duty cycle будет определять, какая часть каждой волны активна (высокий уровень) по сравнению с неактивной (низкий уровень).
В контексте VESC, duty cycle может быть использован для регулирования скорости вращения мотора. Например:
- Duty cycle 0% означает, что мощность на двигатель не подается вообще.
- Duty cycle 50% означает, что мощность подается половину времени — другими словами, если мы рассмотрим один период сигнала, то половина этого периода сигнал будет активен, а половина — нет.
- Duty cycle 100% означает, что мощность подается непрерывно, без отключения.
Изменяя duty cycle, контроллер может точно управлять скоростью и крутящим моментом мотора, не изменяя напряжение питания. Это позволяет контроллеру быть очень эффективным в управлении моторами, предоставляя плавное ускорение и торможение, а также возможность поддержания заданной скорости в широком диапазоне нагрузок.
Другие записи
Справочник параметров Vesc Tool 6.05

Справочник ошибок контроллера VESC
FAULT_CODE_OVER_VOLTAGE / Перенапряжение ⚓
Описание: Входное напряжение превысило максимально допустимый предел, установленный в настройках (Maximum Input Voltage).
Возможные причины:
- Рекуперативное торможение при полностью заряженной батарее (напряжению некуда уходить).
- Лимит напряжения...
Как работает ослабление поля в VESC контроллерах
Field Weakening (ослабление поля) — это метод управления электродвигателем, позволяющий увеличить скорость вращения выше номинальной за счет снижения магнитного потока. Эта техника особенно важна для BLDC и PMSM двигателей, управляемых...
Выбор наблюдателя в VESC
Ах, выбор наблюдателя состояния в VESC! Это как выбирать специи для блюда: правильный выбор может превратить ваш электроскейт или электровелосипед в кулинарный шедевр на колесах, а неправильный... ну, скажем так...
Справочник параметров VESC (Конфигурация приложений)
General (Общие настройки)
General (Основные параметры)
APP to Use / Используемое приложение ⚓
Описание: Определяет, какой тип внешнего устройства или протокола будет использоваться для управления VESC. Если у вас несколько...


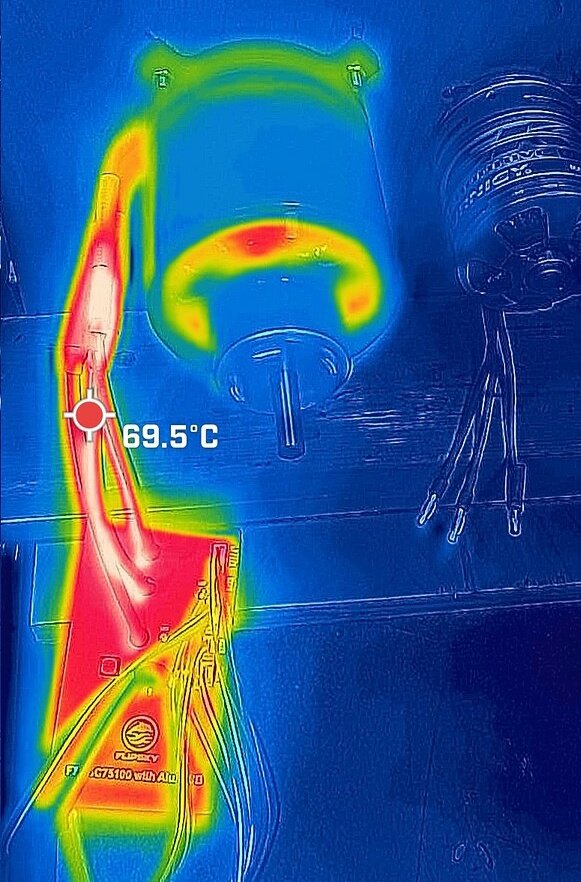
Контроллер VESC 75100 Aluminium










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
VESC контроллер: Особенности и принцип работы
Контроллер VESC (Vedder Electronic Speed Controller) — это продвинутый, программируемый контроллер скорости с открытым исходным кодом, предназначенный для управления бесколлекторными двигателями (BLDC). Его основная задача — точно регулировать скорость, направление...